摘要
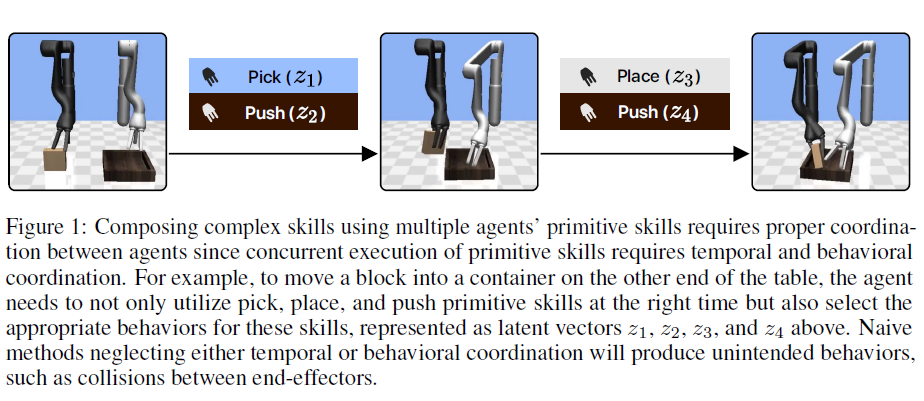
当完成一个复杂的操纵任务时,人们经常将任务分解为身体各个部分的子技能,独立地练习这些子技能,然后一起执行这些子技能。同样,具有多个末端执行器的机器人可以通过协调每个末端执行器的子技能来执行复杂的任务。为了实现技能的时间和行为协调,我们提出了一个模块化框架,该框架首先通过skill behavior diversification分别训练每个末端执行器的子技能,然后学习使用技能的多种行为来协调末端执行器。我们证明了我们提出的框架能够有效地协调技能,以解决具有挑战性的协作控制任务,例如捡起一根长棒,在用两个机械手推动容器的同时在容器内放置一个块以及用两个蚂蚁推动容器。 视频和代码可在上获得。
论文信息

- 作者:Lee, Y., Yang, J., & Lim, J. J. (2019).
- 出处:ICLR2020 Poster
- 机构:University of Southern California
- 论文链接
- 开源代码:
- 其他资料:
内容简记